A function where the corresponding surface is such that
Consider only piecewise regular surfaces that are unions of images of parametrized surfaces i : for which:
(i) is an elementary region in the plane;
(ii) is of class and one-to-one, except possibly on the boundary of ; and
(iii) , the image of , is regular, except possibly at a finite number of points.
Graph as a Surface
Plane as a Surface
since
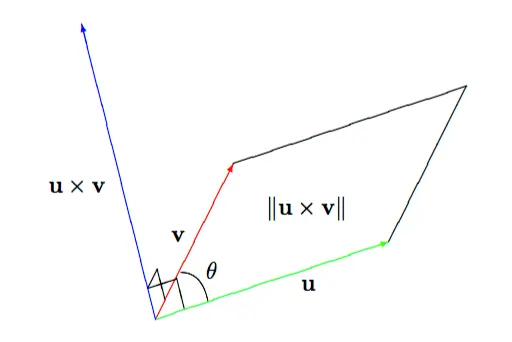
is the norm
where n is the norm of the plane
can solve for points to get parametric form
parameterization
is the point (anchor). and are the direction vectors. and are scalar parameters.
If you have points on a plane then you get by finding the direction vectors.
Project points on x,y plane and use that for parameters
Tangent Vector of a Surface
fixes and traces curve in one direction does the opposite
when is free we have the tangent:
when is free we have:
The span of the tangent vectors is the tangent plane of a surface
Norm and Tangent Plane of a Surface
if is regular at the norm of the tangent plane at is
There tangent plane is therefore the points
Def: regular differential surface
A differential surface is regular at if
Smooth/Regular if this is true for all
Area of a Surface
Define
if we have
Integral of a Function Over a Surface
We have a surface as a real-valued continuous function defined on
The integral of over is
we can think of this as summing over up small areas:
Example:
Let be the surface determined by the graph of the function defined by
Integral Over Graphs
where
so
Integral of a Vector Field Over a Surface
Stoke's Theorem
Line integral of a boundary of a surface in .
Let S be an oriented surface defined by a one-to-one parametrization : → S, where D
is a region to which Green’s theorem applies. Let denote the oriented boundary
of S and let F be a vector field on S.
**
If S has no boundary, and this includes surfaces such as the sphere, then the integral
on the left is zero
Complete Formula for Implicit Surfaces
After choosing a convenient projection, the surface integral becomes
Example:
is the intersection of
So is the intersection of a cylinder and a plane
We want
we can find this graph simply as
So and = Graph() =