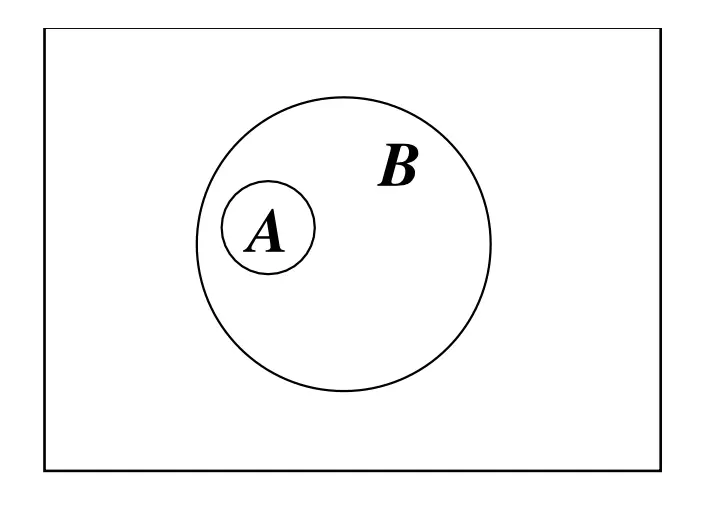
If we know is true then when can deduce that is true. If is not true we can deduce is not true.
and both true is the region . or are true is the region .
If is not true we cannot deduce anything about since is nonempty.
The same thing with is true, we can't deduce anything about though it increases the plausibility that is true. When changing the plausibility of one proposition based on another proposition we are making an induction.
Desired Properties of Plausibility Measures:
Degrees of plausibility are nonnegative
They qualitatively agree with common sense. Larger means greater plausibility
If a proposition can be represented in multiple ways, then they must have the same plausibility
Always take all relevant evidence into account
Equivalent states of knowledge are always given the same plausibility
Probability
Random Experiment - Outcome is not completely predictable. Can be repeated under the same conditions. Outcome - the result of one single trial of the single trial of the random experiment Sample Space - set of all possible outcomes of a single trial denoted or for universe. Event - any set of possible outcomes of a random experiment union - either event or event intersection - both event and event complement - set of outcomes not in denoted here as mutually exclusive - (disjoint) partition - and ,
Axioms of Probability
for any event
If and are mutually exclusive then
basic probability theorems
Basic Probability Theorems
which is the powerset of
Event and Its Complement
pf:
Probability of the Empty Set
pf:
Probability and Subsets
pf: and
Probability Range
pf:
Inclusion Exclusion
pf:
Continuity Theorem
Probability of Union and Intersections
Let be non-decreasing
Let be non-increasing
pf (non-decreasing):
Boole's Inequality
Let be an arbitrary sequence of events
pf:
Marginal Probability -
Conditional Probability and Independence
Conditional probability of event relative to the hypothesis of event
Conditional Probability
Let and be events where
Multiplication Rules
Total Law of Probability
where forms a partition of
pf.
Bayes Theorem
Assume be events such that and they form a partition.
For any event :
pf:
Independence
and are independent if:
Equivalently if: Mutually Independent iff they are pairwise independent:
Baye's Theorem
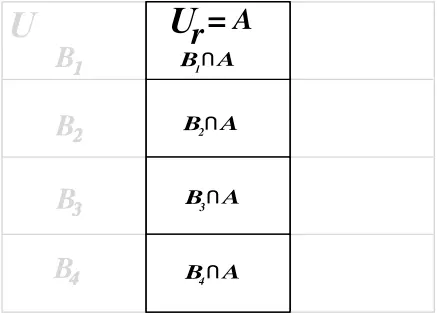
Let be a set of unobservable events which partition the universe.
We start with our prior probability for each which can be informative of non-informative. This distribution gives the weighting of our prior beliefs. Then we find that has occurred.
The Likelihood of the unobservable events is the conditional probability that has occurred given each , . It's the weight given to each of the events given that occurred.
The posterior probability is , this distribution contains the weight we attach to each of the evens after we know event has occurred.
Bayesian Universe
Has two dimensions, one observable and one unobservable where the observable dimension is the horizontal.