5.1 Osculating Polynomials
Taylor polynomial: need value and derivatives at a point (center)
Lagrange/Newton polynomial: need value at multiple points
Osculating polynomials contain these two and everything in between!
More formally, they require points
specified at each
When two points and their first derivatives are given, this gives the cubic Hermite
polynomial.
Hermite Polynomial
Through the following data:
the (degree at most three) Hermite polynomial is:
where
General Osculating Polynomials
This is a Hermite divided difference table, which incorporates both function values and derivatives. The factorials appear because repeated nodes require special handling for derivatives.
In standard Newton divided differences, the entries are computed using:
However, when a node is repeated, we incorporate derivatives:
- If
is repeated, the first divided difference is:
- The second derivative information appears using factorial scaling:
- More generally, higher-order derivatives are divided by the corresponding factorial.
2. Given Data
We are given:
Since we incorporate derivatives, we repeat nodes in the table.
3. Step-by-Step Computation
First Column: Function Values
Directly from the given data:
First Divided Differences
Using:
For repeated nodes, use:
And:
Second Divided Differences
Using:
For second derivative information:
And:
Third Divided Differences
Using:
And:
Fourth Divided Differences
Using:
Final table:
4. Key Observations
Factorials appear in repeated nodes to properly handle derivatives
Using
Final highest-order divided difference (1) contributes to the highest-degree term in the polynomial
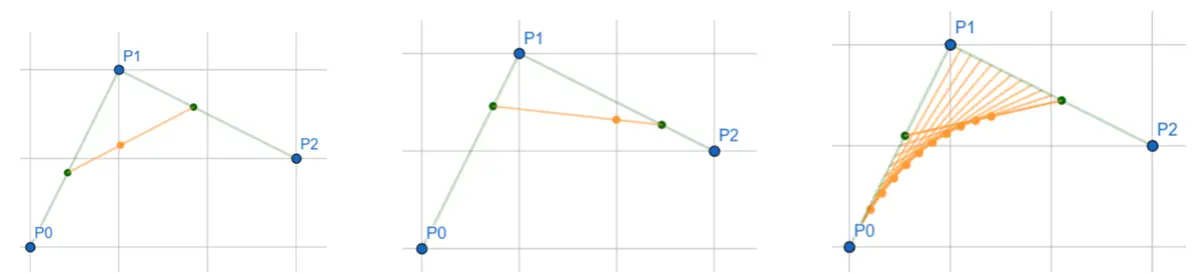
Bèzier Curves
These are parametric curves with parameter
Simple example:
If we make it quadratic then we have:
Thus we have 2 known dependant values but 3 unknowns giving us free parameters.
Bezier Curve from
Via "control points"
First simple idea:
For some fixed
Now
Releasing
General Form:
Linear Bèzier curves:
These are
Higher order curves:
These are the the at most
We will get:
Example:
The (at most) cubic Bézier curve with control points
is computed as follows:
First-order interpolation:
Second-order interpolation:
Third-order (cubic) interpolation:
Derivatives:
Evaluating at ( t=0 ) and ( t=1 ):
These derivatives indicate that at